La salud de Karel
Andar entre muros no es bueno para un robot, por lo tanto Karel tiene algunos mecanismos salvavidas dentro de él. Si un programa le dice a Karel que se mueva aunque haya un muro delante de él, él dirá que hay un error y no realizará la acción. Lo mismo ocurrirá si le decimos que coja un zumbador en una esquina y no existe ninguno. Las únicas órdenes que siempre lleva a cabo sin importar la situación en la que se encuentre son turnleft() y turnoff(). Cuando Karel nos dice que hay un error, no tenemos que echarle la culpa, sino que probablemente habremos escrito mal alguna instrucción.
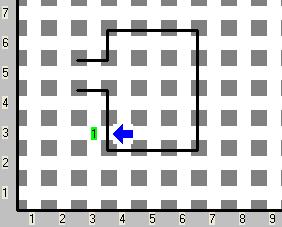
Ejercicio 2 : Cada mañana Karel se levanta de la cama y tiene que recoger el periódico, representado por un zumbador, que está en el porche de la casa. Escribe un programa que ordene a Karel que recoja el periódico y lo lleve de vuelta a la cama. La situación inicial es la de la imagen de abajo, y la situación final debe tener a Karel de vuelta en la cama (misma esquina, misma dirección que cuando empezó) con el periódico (zumbador en su mochila). Crea un mundo como el de la imagen y guárdalo como “periodico.mdo”.